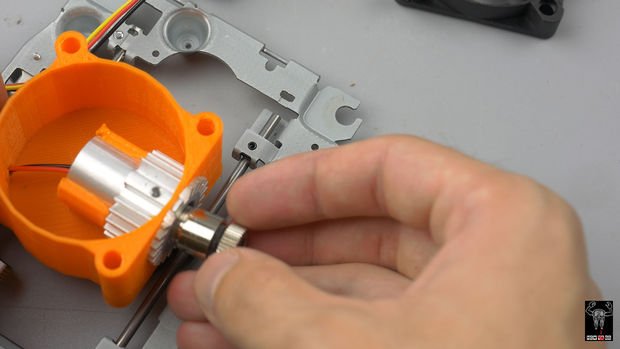
مرحله ۱: باز کردن DvD درایوها



ابتدا ما به دو درایو اپتیکال CD یا DVD نیاز داریم. ما قصد داریم که از استپ موتورها و دیودهای لیزری استفاده کنیم و تمام اجزای نوری را خارج کنیم. از حمل کنندهها برای محورهای X و Y استفاده خواهد شد. ما باید آنها را عمود به هم محکم کنیم. روش انجام آن نیز به سلیقه شما بستگی دارد.
مرحله ۲: مونتاژ پایه








ما در این پروژه در حدود ۱ متر آلومینیوم نبشی و یک قطعه شیشه آکریلیک استفاده کردیم که پایه کار را به وسیله آن بسازیم و محور Y را با استفاده از پیچهای کوچک روی آن نصب میکنیم. سپس محور X را روی آلومینیوم نبشی و براکت چاپ سه بعدی نصب میکنیم. همچنین بهتر است که برای سطح اصلی کار پایههای پلاستیکی بسازید. هر چه سطح میز کار شما صافتر باشد بهتر عمل میکند. برای صرفه جویی در وقت میتوانید یک بار دیگر از چاپگر سه بعدی استفاده کنید.
مرحله ۳: لیزر





مرحله بعدی استفاده از لیزر است، اگر از یک درایو DVD RW استفاده کرده باشید میتوانید از دیود لیزر آن برای این پروژه استفاده کنید. در اینجا ما قصد داریم از یک ماژول لیزر دست ساز ۱٫۵w 445nm استفاده کنیم. برای استفاده طولانی مدت ما باید این لیزر را خنک نگه داریم. برای DVD یک تکه کوچک از آلومینیوم کفایت میکند، اما با لیزر قویتر باید از سیستم خنک کننده استفاده کنیم. ما از براکت پرینت شده برای ثابت نگه داشتن دیود لیزر به یک هیت سینک و یک فن ۵۰ میلیمتری استفاده میکنیم. همچنین از آنجا که هوا تنها از پایین خارج میشود ما مشکل تخلیه دود از سطح حکاکی را با این روش حل کردیم. برای حفظ ایمنی شما باید حتما از عینک محافظ لیزر نیز استفاده کنید.
مرحله ۴: اجزای الکترونیک







برای کنترلر اصلی ما از یک Arduino nano استفاده میکنیم، همچنین به دو استپ موتور A4988، MOSFET IRFZ44N، دو مقاومت ۴۷ اوهم و ۱۰ کیلواهم نیز نیاز داریم. منبع تغذیه مورد نیاز برای موتورها و لیزر باید ۱۲ ولت و حداقل ۳ آمپر باشد. برق مورد نیاز Arduino نیز مستقیما از usb تامین میشود. یکی از نکاتی که باید به آن توجه ویژهای داشته باشید خنک کننده لیزر است، زیرا با توان ۷۰۰mA گرمای زیادی تولید میشود. ما این مدار را روی بردبورد نصب کردیم. MOSFET به کار رفته در این مدار نیازی به هیت سینک ندارد.
مرحله ۵: میان افزار







قبل از تنظیمات ما باید میان افزار مورد نیاز را آپلود کنیم. ما در اینجا از GRBL 1.1 استفاده میکنیم. شما میتوانید با مراجعه به این آدرس آن را دانلود کنید. ما تنها به فولدر grbl اضافه شده به فایل زیپ نیاز داریم. سپس در Arduino IDE به Sketch بروید و .ZIP Library را اضافه کنید و فولدر grbl را انتخاب کنید. سپس نمونه grbl upload را باز کنید و آن را به بورد Arduino خود آپلود کنید. شما به یک نرم افزار برای ارسال G-Code به قلم حکاکی نیز نیاز خواهید داشت. ما در این پروژه از “Laser GRBL” استفاده کردهایم که از پورت com و سرعت ۱۱۵۲۰۰ استفاده میکند.
مرحله ۶: تنظیم راه انداز استپ موتورها



در بخش الکترونیک ما باید جریان درست استپ موتورها را قبل از اتصال به آن تنظیم کنیم. برق ۱۲ ولت را وصل کنید، Arduino را به کامپیوتر متصل کنید و ولتاژ پتانسیومتر تریمر را اندازه گیری کنید. شما میتوانید از طریق فرمول زیر آن را محاسبه کنید:
Vref = Current Limit * 8 * 0,100 = Current Limit / 1,25
اما از آنجا که ما جریان درست موتورها را نمیدانیم، آن را در حدود ۲۵۰mV تنظیم و موتورها را متصل میکنیم. اگر دیدید یکی از موتورها بیش از حد داغ میشود آن را به ۱۳۰mV کاهش دهید. همزمان با نصب ۳ پین درایور با استفاده از نرم افزار GRBL و استفاده از فلشهای مکان نما سعی کنید محور را حرکت دهید. برای توقف اضطراری نیز دکمه چراغ دار را فشار دهید.
مرحله ۷: تنظیمات برنامه



در این مرحله ما قصد داریم تنظیمات برنامه را انجام دهیم. دستگاه حکاکی خود را به کامپیوتر متصل کنید و دو $$ را ارسال کنید. شما فهرستی از پارامترهای ذخیره شده در حافظه Arduino را دریافت خواهید کرد. ما بیشتر با شماره خطها کار داریم:
۳۰ – حداکثر PWM لیزر، با این مقدار در Arduino پین d11 ولتاژ ۵V را دریافت خواهد کرد. شما میتوانید این پارامتر را بدون تغییر رها کنید، اما ما آن را به ۲۵۶ تغییر میدهیم. این کار با ارسال فرمان $ ۳۰ = ۲۵۶ انجام میشود.
۳۲ – حالت لیزر، شما در اینجا باید مقدار ۱ را ارسال کنید. $ ۳۲ = ۱
۱۰۰ – تعداد استپهایی که موتور ما برای جابجایی ۱ میلیمتر در جهت محور X باید طی کند.
۱۰۱ – پارامتر مشابه برای محور Y، این دو پارامتر نیز باید محاسبه شوند.
۱۳۰ و ۱۳۱ – حداکثر ابعاد محورهای X و Y که به اندازه درایو بستگی دارد.
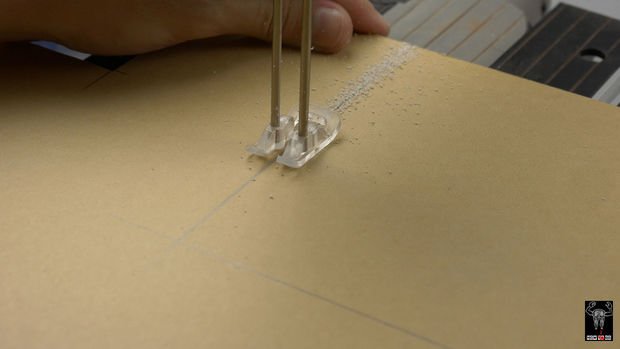
به منظور تنظیم نقطه فوکوس لازم است که لیزر را روشن کنید. برای انجام این کار باید M3 S250 و G1 X0 S25 F50 را ارسال کنید. این فرمان لیزر را با قدرت ۱۰% فعال میکند.
مرحله ۸: تنظیمات نهایی



آخرین نکته حائز اهمیت این است که ما محدودیتی روی محور نداریم و مکان قرارگیری موتورها در زمان روشن شدن دستگاه روی مختصات صفر تنظیم خواهد شد. بنابراین قبل از روشن کردن دستگاه حکاکی شما باید محور را روی موقعیت حداکثری تنظیم کنید. شما به راحتی میتوانید این کار را با G-Code از قبل آماده شده انجام دهید.